
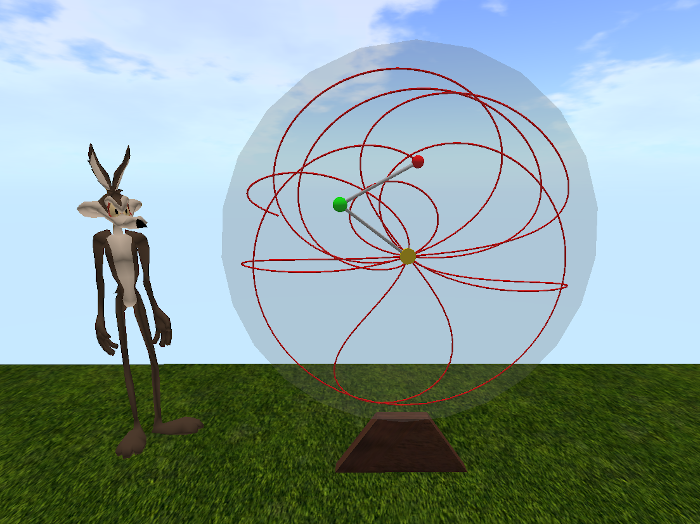
Fourmilab Double Pendulum for the Second Life virtual world has now been released and is available for free, with full permissions (copy/modify/transfer) from the Second Life Marketplace. It is a physical model of a double pendulum system in which two masses (“bobs”) swing on frictionless bearings on rods, with the first mass connected to a fixed hub and the second mass swinging freely beneath the first. This simple system exhibits extraordinarily complicated and chaotic motion, which varies dramatically as parameters of the system (masses of the bobs, lengths of the rods, initial displacements of the masses) are varied. Fourmilab Double Pendulum models an ideal double pendulum system, with no friction or air resistance, and allows you to change the parameters of the model and observe the results. Facilities allow tracking the chaotic motion of the lower bob, displaying its path as the system evolves. The model is fully scriptable with commands supplied in notecards in its inventory and scripts may define pop-up menus through which an avatar may interact with the model.
For details, see the “Fourmilab Double Pendulum User Guide” which is provided as the help file with the model. Complete source code is available from the project’s GitHub repository.
Lest you think the chaotic behaviour of this classical mechanical system is a fantasy of computer simulation, here is a (literally) nuts and bolts double pendulum swinging in the real world. (In this video, the device is a compound pendulum in which the mass of the arms is distributed along their length, while my model is a simple pendulum where mass is concentrated in the two bobs and the rods connecting them are treated as massless. This makes no difference in the behaviour of the system.)

Here is a derivation of the equations of a double pendulum system using Lagrange’s equations. My simulation performs its calculations using the closely related Hamiltonian mechanics, which works in terms of momenta rather than velocities.
 Using Lagrange's Equations")
Of course you can wear it as a hat!
