The spacecraft was launched on 2023-07-14 on a LVM3 rocket from ISRO’s Satish Dhawan Space Centre and entered lunar orbit on 2023-08-05. Landing is planned for a site between Manzinus C and Simpelius N craters at 69.367621° S 32.348126° E on the Moon’s near side.
If the lander, named Vikram, touches down successfully, it is planned to deploy a rover named Pragyan on the surface. The lander and rover are expected to operate on the lunar surface for the approximately 12 Earth days before sunset at their location. They are not designed to survive the lunar night.
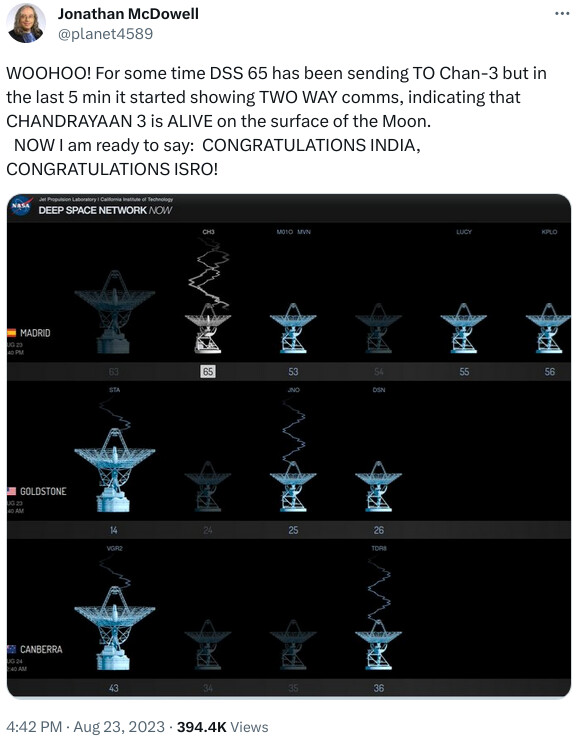
The live Webcast of the landing attempt is expected to start at 11:50 UTC on 2023-08-23.
On the other hand, they do have a live image feed from the lander during the descent. Which we mostly get to see via a camera aimed at the screen in the control room, often from a distance so it’s no larger than a postage stamp on the screen.
The poor presentation, sadly, masks the wonder of the actual accomplishment. Although there was impressive live video from the lander, it’s hard to understand why it wasn’t shown prominently and continuously. I kept waiting to see the surface dust disturbance from the rocket plume as the actual landing approached. Never saw it. Nonetheless, a great accomplishment.
It looked like the imagery during the landing was transmitted as a series of still images every few seconds. Depending upon the exposure time of each image, it may have largely frozen the motion of dust in the last few seconds before touchdown. Let’s hope ISRO assembles and releases a video from the landing images so we can see them sharply and in real time.
Also, since the lander was relatively light (I see the mass given as 1752 kg, but that source does not state whether this is the “wet mass” before the landing burn or the mass at touchdown), the landing rockets would not throw up a dust plume anything comparable to the Apollo lunar module, which had a launch (“wet”) mass of 15,102 kg.
Here is video of the ISRO rover Pragyan descending to the lunar surface on 2023-08-23, around four hours after landing. The solar panel is vertical in order to best capture the sunlight at the oblique angle at which it arrives at the 69.4° south latitude landing site. Note the long shadows cast by the rover on the surface.
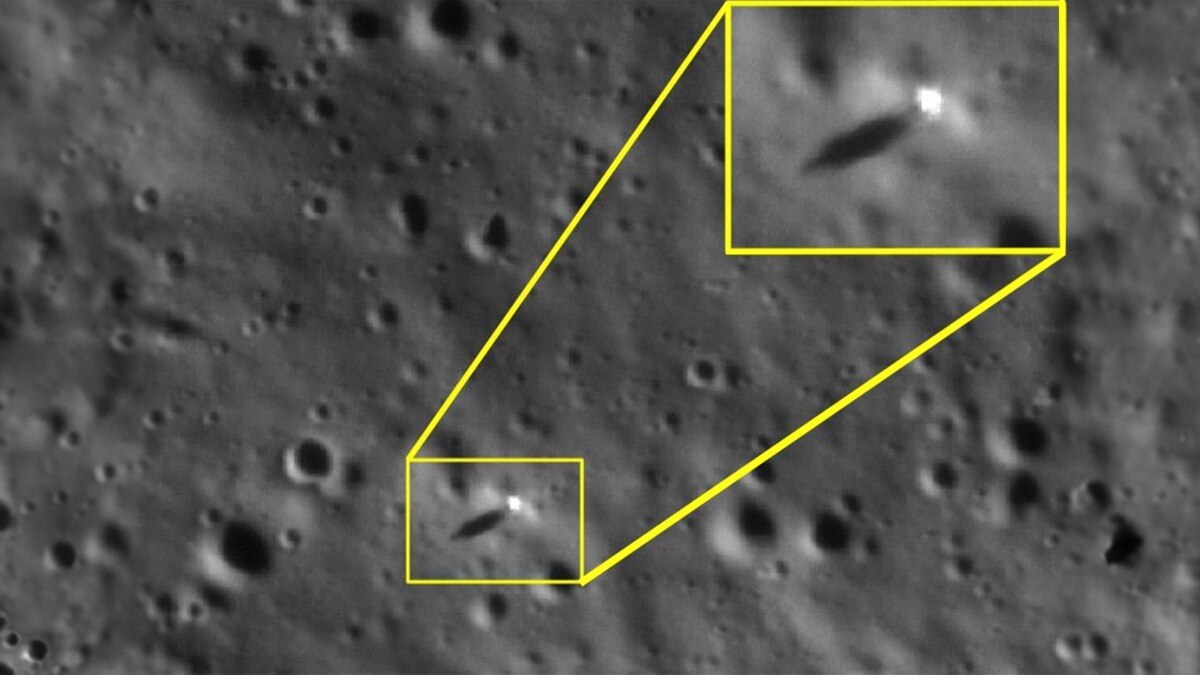
Here is video of the Vikram lander’s descent to the lunar surface. In the final frame, what appears to be dust thrown up by the landing engines is visible. The landing sequence is followed by imagery of the lander on the lunar surface captured by the Chandrayaan-2 orbiter in lunar orbit. That image shows what appear to be bright areas on either side of the lander that may be composed of dust ejected during the landing.
This is a video of the complete approach and landing sequence. Craters on the Moon have a self-similar distribution of sizes, which makes it particularly difficult to judge altitude visually. This is why Apollo lunar landing mission rules required aborting a landing attempt if the altitude radar failed.
The lander appears to have touched down on a substantial slope. What looks like it might be light regolith thrown up by the plume of the landing engine is visible to the left. This was also seen in overhead images from orbit.
I wonder what resolution camera are on-board the lander and the rover?
The book of knowledge (source) mentions 2 stereoscopic navigation cameras with 1 megapixel resolution. That’s somewhat surprising for 2023, but consistent with the poor level of detail in these pictures.
A quick search did not yield any information regarding the camera specifications for theh Chandrayaan-3 lander.
These images would have a hard time to compete with the beautiful Hasselblad camera images taken by Apollo astronauts fifty years ago.
According to the description of the Vikram lander on Chandrayaan-2, which appears to be identical to the one on Chandrayaan-3, the lander carries four cameras:
A high resolution camera, Laser Altimeter (LASA)
Lander Hazard Detection Avoidance Camera (LHDAC)
Lander Position Detection Camera (LPDC)
Lander Horizontal Velocity Camera (LHVC)
I have not found a description of the resolution of these cameras. Obviously, whichever one was used to image the rover descending to the surface handles colour.
The image quality may have been constrained by the communication bandwidth available to transmit them to the Earth. The lander doesn’t look like it has anything like the high gain antennas used to transmit television from the Apollo service module and set up on the Moon by astronauts. If they have only an omnidirectional antenna, even using one of the NASA or ESA deep space dishes (on which time available is severely limited due to demands of other missions), they may have opted for lower resolution (such as the dual 1 megapixel monochrome cameras on the rover) so that compressed images could be sent back quickly. NASA’s Lunar Reconnaissance Orbiter, by comparison, has a steerable high-gain antenna which provides a 100–300 megabit per second downlink, but then its budget was US$ 583 million, whereas the cost of Chandrayaan-3 is estimated as ₹721 crore or US$90 million.
Yes, all good points. Agreed re: bandwidth, however wouldn’t the image quality limiting factor be the sensor resolution?. A larger sensor yielding higher image sizes would just take longer to transmit the pictures over a slower link, no?
From the wikipedia page is seems like the rover design was being finalized some time in 2016, which may mean that having 1 mega pixel hardened camera hardware would be consistent with state of the art circa 2012 plus/minus
So quite possible that camera sensor capabilities ended up being driven the small budget forcing design decisions that appear technologically obsolete to us ten years later.
I wonder if the real time selection of the landing site (an onboard algorithm, I guess) was sophisticated enough to account for deployment of the rover. In the video of the rover’s deployment, I note that the right front wheel stops very close to what looks like a crater which looks deep enough to cause problems. The subsequent pictures of the lander means no such problem occurred. Nonetheless, I wonder if the ability to deploy the rover down its ramp was left to chance.
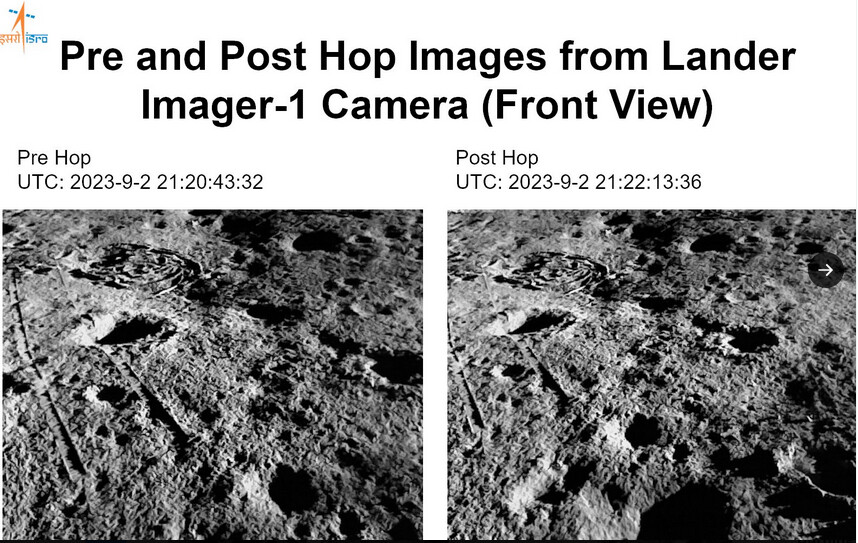
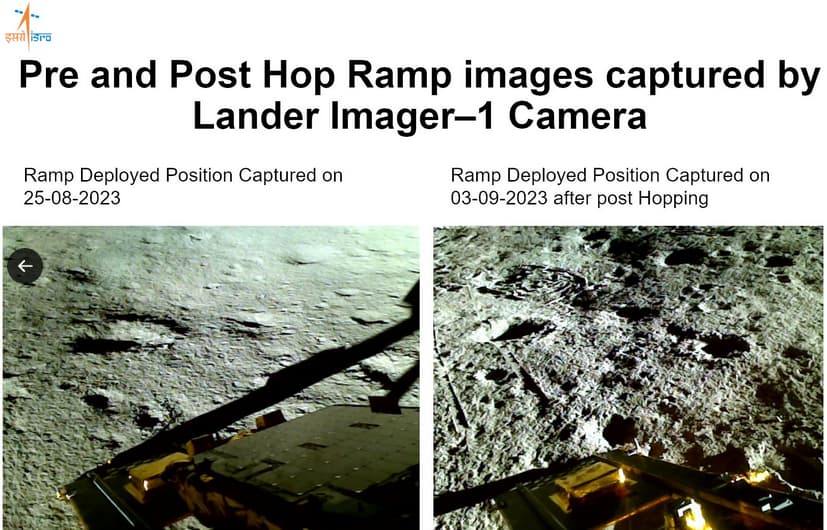
With sunset approaching at the Chandrayaan-3 landing site and the rover having already gone to sleep, ISRO decided to perform a high-risk maneuver made possible by propellant left in the tanks after landing and “hop” off the Moon’s surface and land again a short distance from its original touchdown location. The landing engines were briefly fired, rising 40 cm from the surface and landing 30 cm from its original location. Here is a video assembled from still frames captured during the hop. Note the lunar dust thrown up by the engine plume.
Was the Vikram lander, then, the first spacecraft to land twice on the Moon? No, it wasn’t. On 1967-11-17, NASA commanded its Surveyor 6 lander to make a similar hop from its initial landing site to a location around 3 metres away. This was the first spacecraft to lift off from a celestial body other than the Earth.
Now, as night falls, the lander is powering down. Apparently the lander and rover do not contain the plutonium-238 heaters U.S., Russian, and Chinese lunar landers use to protect batteries and other electronics from the frigid two week lunar night, and were not expected to survive the night. But hope springs eternal, and the radio receivers were left on to see if when the Sun returns and charges up the batteries the intrepid explorers will wake up.
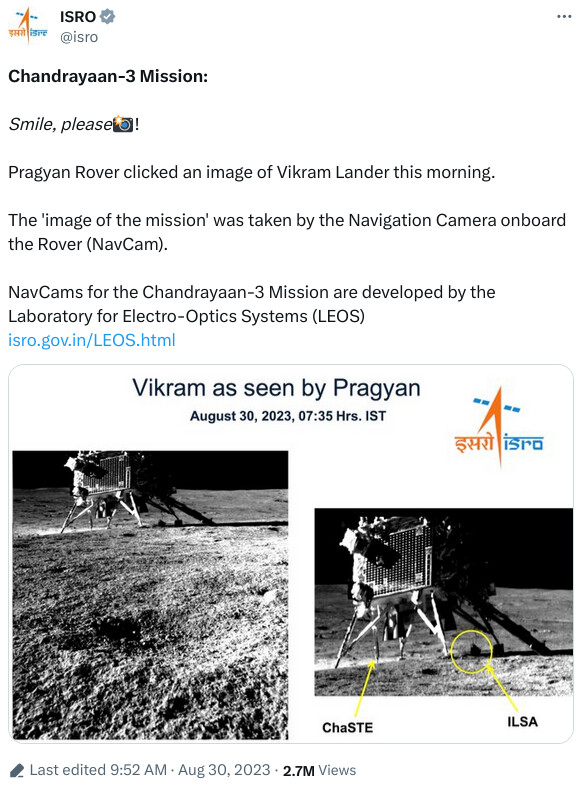
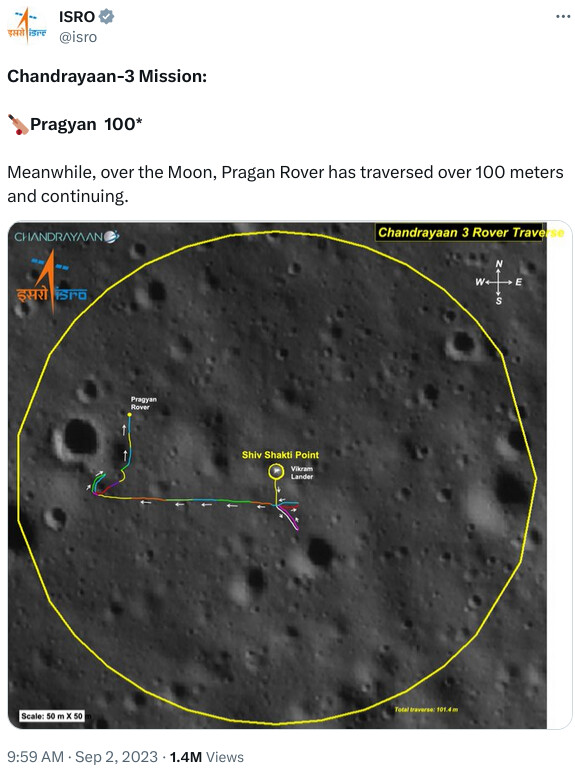
The path of Vikram’s tracks is noteworthy. In the original post, I noted that its right front wheel seemed precariously aimed at a small crater, and assumed it would need to divert away from it. Wrong! The above photos make clear that Vikram went straight ahead and the crater proved no obstacle. In fact, the track marks can be clearly seen inside the rim of the crater. This is but a small note in a symphony of remarkable engineering.
Small lunar craters don’t tend to be very deep or have steep walls. This is because most impacts have sufficient velocity to vaporise the impactor and the site it hit. This causes a rapidly-expanding cloud which spreads horizontally across the surface, explaining why, even though most impactors will hit on oblique trajectories, the craters produced are uniformly round. Scott Manley explains this in the following video.
Further, the steady rain of micrometeroid impacts erodes and smooths out sharp features, so craters made by spacecraft that have hit the Moon can usually be identified by their sharp edges which have not yet been eroded and filled in.






")